AlexNet
[选读]历史
2000 流行的机器学习方法——SVM,核方法
- 核方法替代了之前的神经网络网络方法,SVM 对于调参不敏感,现在也有一些应用
- 本质上是特征提取,具体的方法是选择核函数来计算,把特征映射到高纬空间,使得他们线性可分
- 经过核函数计算之后,原问题可以转化为凸优化问题,这是 2006 年左右的研究热点
- 核方法有很多漂亮的定理,有很好的数学解释性
- 2010 年左右,深度学习才兴起
2000 计算机视觉主要方法——几何学
- 首先还是对图片进行特征抽取
- 希望把计算机视觉问题描述成几何问题,建立(非)凸优化模型,可以得到很多漂亮的定理。
- 可以假设这是一个几何问题,假设这个假设被满足了,可以推出很好的效果
2010 计算机视觉的热点问题——特征工程
- 特征工程就是怎么抽取一张图片的特征,因为直接输入一张图片效果非常的差
- 特征描述子:SIFT,SURF
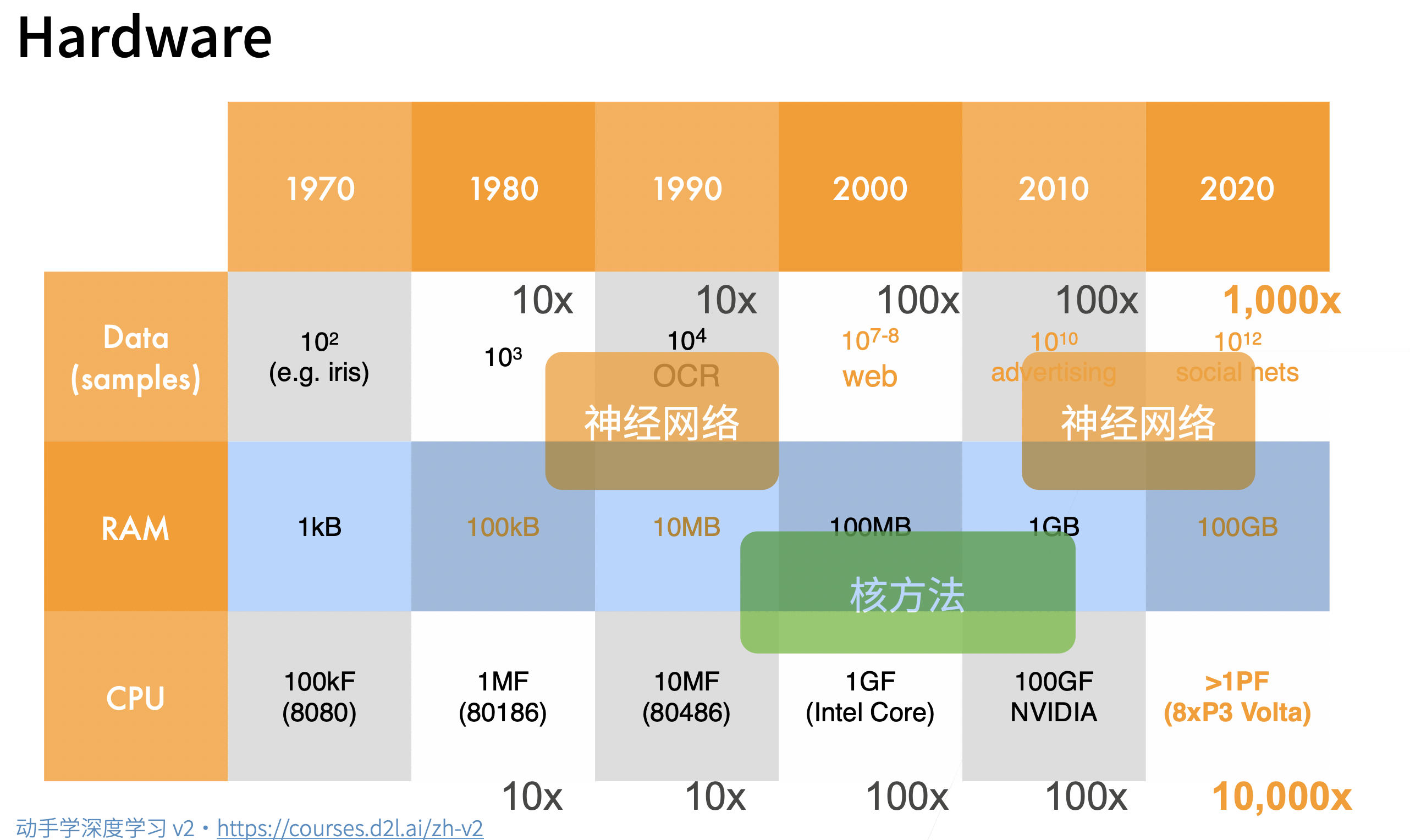
硬件的发展奠定了深度学习的兴起
数据的增长,硬件的计算能力奠定了人们对于方法的选择
ImageNet(2010)
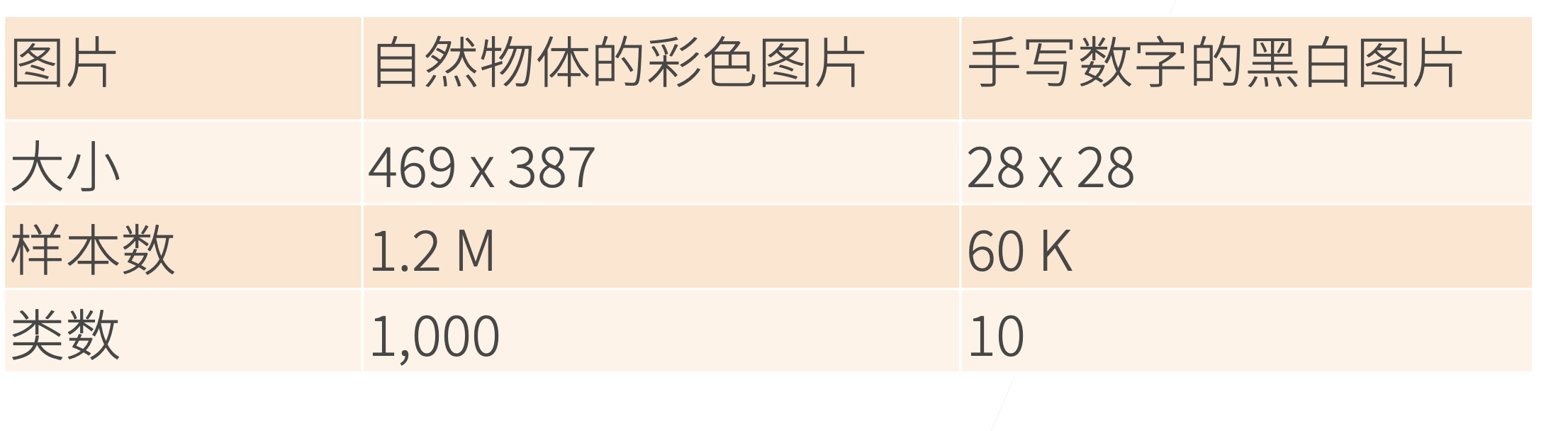
- AlexNet 赢得了 2012 年 ImageNet 竞赛冠军
- 本质上是一个加强版的 LeNet,更深更大
- AlexNet 主要改进措施:
- dropout(正则)
- ReLu(梯度更大)
- MaxPooling(取最大值,梯度相对增大)
- 影响:计算机视觉方法论的改变,从人工提取特征过渡到 CNN 学习特征

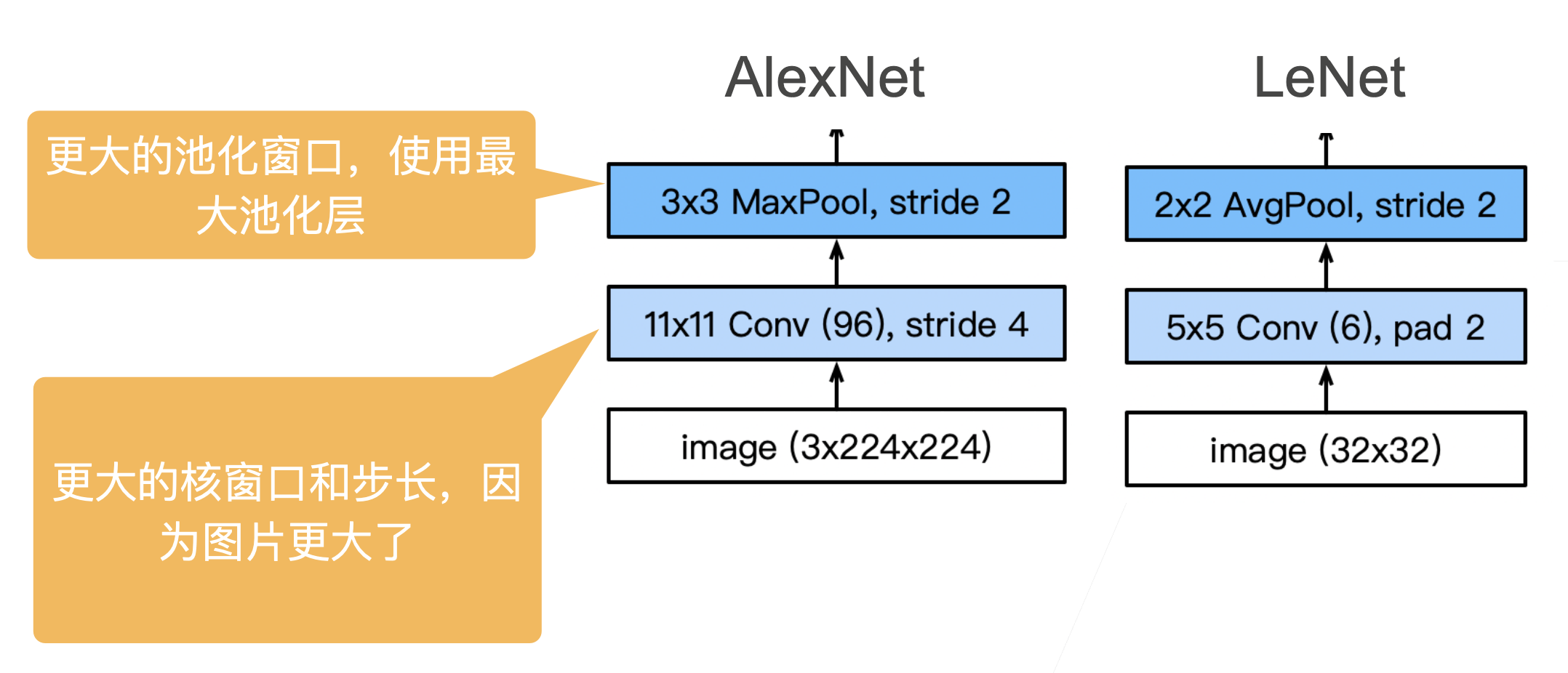
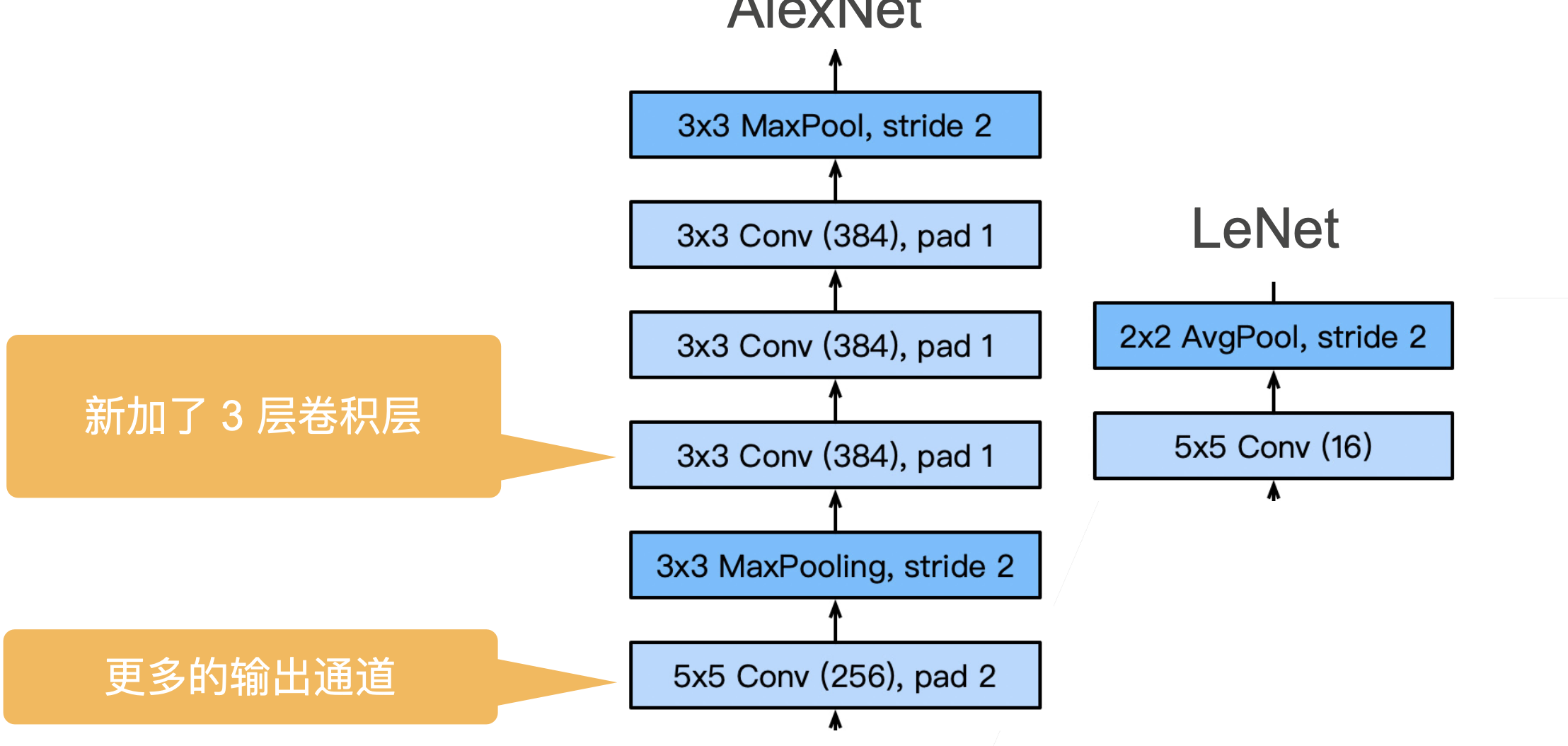
AlexNet 架构
网络代码
python
net = nn.Sequential(
这里,我们使用一个11*11的更大窗口来捕捉对象。
# 同时,步幅为4,以减少输出的高度和宽度。
# 另外,输出通道的数目远大于LeNet
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 使用三个连续的卷积层和较小的卷积窗口。
# 除了最后的卷积层,输出通道的数量进一步增加。
# 在前两个卷积层之后,汇聚层不用于减少输入的高度和宽度
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
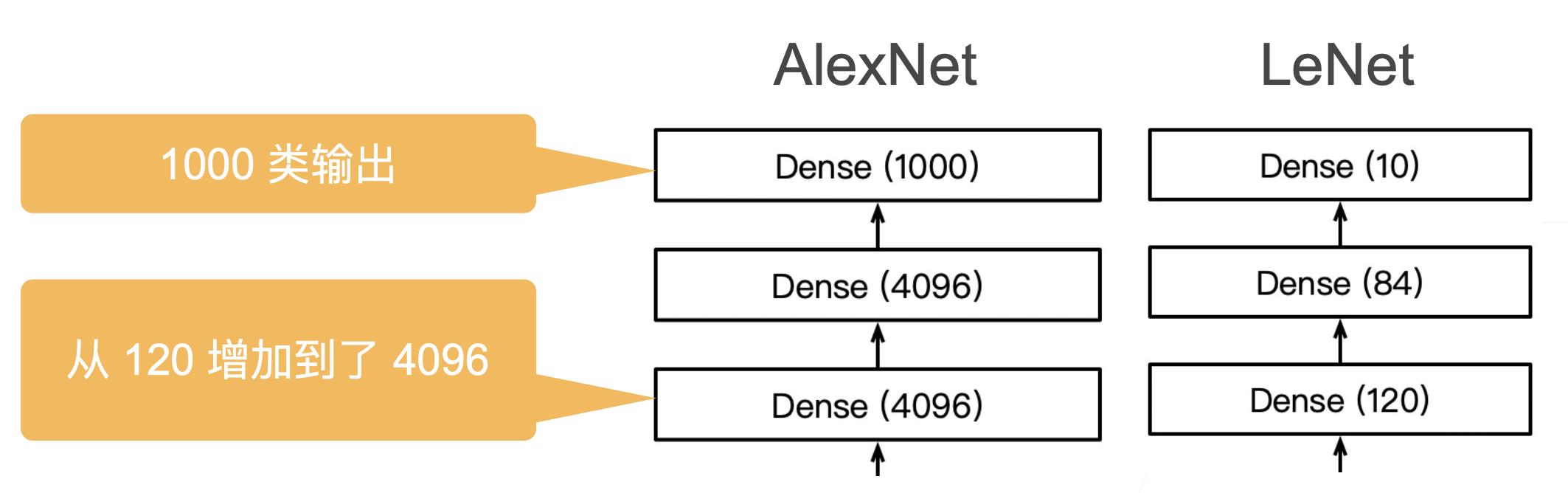
# 这里,全连接层的输出数量是LeNet中的好几倍。使用dropout层来减轻过拟合
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# 最后是输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10))更多细节
- 激活函数从 sigmoid 变成 Relu,减缓梯度消失
- 隐藏全连接层后加入了丢弃层(2 个 4096 之后加入了 dropout)
- 数据增强,将一张图片进行变化,选取多个位置、光照之类的。

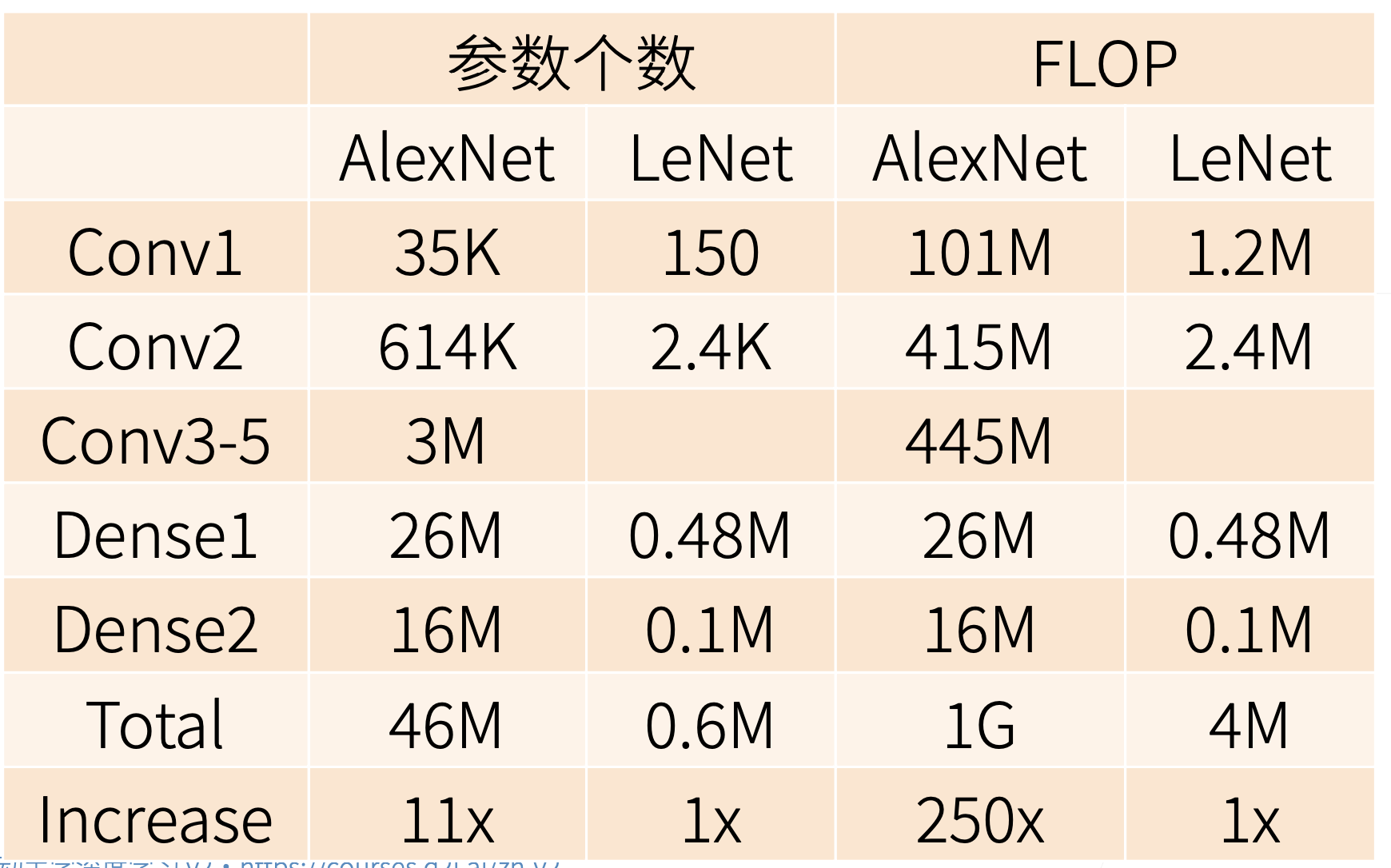
复杂度对比
参数个数增加,每次更新数据增加