物体检测
介绍
目标检测(Object Detection)是计算机视觉领域的一个重要任务,其任务是从一张或多张图像中检测出感兴趣的目标,并给出其位置信息。目标检测的主要任务有两个:
- 目标分类:识别出图像中所有感兴趣的目标类别,如人、车、狗等。
- 目标定位:确定目标的位置信息,如目标的中心点、边缘框、关键点等。
图片分类和目标检测在任务上的区别:图片分类已知有一个确定目标,任务是识别该目标属于何种分类,而目标检测不仅需要检测出图片中所有感兴趣的目标类别,并确定其位置,所以目标检测要比图片分类更复杂应用场景更广。
图片分类和目标检测在数据集上的区别:由于目标检测中每一张图片可能存在多个目标,每个目标我们不仅需要分类,还需要确定边缘框以给出目标位置信息,因此目标检测数据集的标注成本要显著高于图片分类,也就导致了目标检测数据集较小。
边缘框:用一个尽量小矩形框将目标物体大体框起来,边框的位置信息就可以表示目标位置在图片中的位置信息,常见的边缘框有两种表示方法:
- (左上 x,左上 y,右下 x,右下 y)
- (左上 x,左上 y,宽,高)
目标检测数据集的常见表示:每一行表示一个物体,对于每一个物体而言,用“图片文件名,物体类别,边缘框”表示,由于边缘框用 4 个数值表示,因此对于每一行的那一个物体而言,需要用 6 个数值表示。
目标检测领域常用数据集:COCO(80 类物体,330K 图片,所有图片共标注 1.5M 物体)
初步实现
我们通过一个例子来看看边缘框的实现。
目标的位置
在图像分类任务中,我们假设图像中只有一个主要物体对象,我们只关注如何识别其类别。 然而,很多时候图像里有多个我们感兴趣的目标,我们不仅想知道它们的类别,还想得到它们在图像中的具体位置。 在计算机视觉里,我们将这类任务称为目标检测(object detection)或目标识别(object recognition)。目标检测在多个领域中被广泛使用。 例如,在无人驾驶里,我们需要通过识别拍摄到的视频图像里的车辆、行人、道路和障碍物的位置来规划行进线路。 机器人也常通过该任务来检测感兴趣的目标。安防领域则需要检测异常目标,如歹徒或者炸弹。
%matplotlib inline
import torch
from d2l import torch as d2l
d2l.set_figsize()
img = d2l.plt.imread('../img/catdog.jpg')
d2l.plt.imshow(img);边界框
在目标检测中,我们通常使用边界框(bounding box)来描述对象的空间位置。 边界框是矩形的,由矩形左上角的以及右下角的 x 和 y 坐标决定。 另一种常用的边界框表示方法是边界框中心的(x,y)轴坐标以及框的宽度和高度。
在这里,我们定义在这两种表示法之间进行转换的函数:box_corner_to_center 从两角表示法转换为中心宽度表示法,而 box_center_to_corner 反之亦然。 输入参数 boxes 可以是长度为 4 的张量,也可以是形状为(n,4)的二维张量,其中 n 是边界框的数量。
def box_corner_to_center(boxes):
"""从(左上,右下)转换到(中间,宽度,高度)"""
x1, y1, x2, y2 = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
cx = (x1 + x2) / 2
cy = (y1 + y2) / 2
w = x2 - x1
h = y2 - y1
boxes = torch.stack((cx, cy, w, h), axis=-1)
return boxes
def box_center_to_corner(boxes):
"""从(中间,宽度,高度)转换到(左上,右下)"""
cx, cy, w, h = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
x1 = cx - 0.5 * w
y1 = cy - 0.5 * h
x2 = cx + 0.5 * w
y2 = cy + 0.5 * h
boxes = torch.stack((x1, y1, x2, y2), axis=-1)
return boxes我们将根据坐标信息定义图像中狗和猫的边界框。 图像中坐标的原点是图像的左上角,向右的方向为 x 轴的正方向,向下的方向为 y 轴的正方向。
# bbox是边界框的英文缩写
dog_bbox, cat_bbox = [60.0, 45.0, 378.0, 516.0], [400.0, 112.0, 655.0, 493.0]我们可以将边界框在图中画出,以检查其是否准确。 画之前,我们定义一个辅助函数bbox_to_rect。 它将边界框表示成 matplotlib 的边界框格式。
def bbox_to_rect(bbox, color):
# 将边界框(左上x,左上y,右下x,右下y)格式转换成matplotlib格式:
# ((左上x,左上y),宽,高)
return d2l.plt.Rectangle(
xy=(bbox[0], bbox[1]), width=bbox[2]-bbox[0], height=bbox[3]-bbox[1],
fill=False, edgecolor=color, linewidth=2)在图像上添加边界框之后,我们可以看到两个物体的主要轮廓基本上在两个框内。
fig = d2l.plt.imshow(img)
fig.axes.add_patch(bbox_to_rect(dog_bbox, 'blue'))
fig.axes.add_patch(bbox_to_rect(cat_bbox, 'red'));物体检测算法
区域卷积神经网络
区域卷积神经网络(Region Convolutional Neural Networks,R-CNN)是目标检测领域的开山之作。 它是基于深度学习的卷积神经网络,并提出了一种全新的区域提议网络(Region Proposal Network,RPN)来生成候选区域。 然后,通过卷积神经网络对这些候选区域进行分类和回归预测,从而检测出图像中所有感兴趣的目标。
R-CNN
- 使用启发式搜索算法来选择锚框
- 使用预训练模型来对每个锚框抽取特征(每个锚框当作一个图片,用 CNN)
- 训练一个 SVM 来类别分类(神经网络之前,category prediction)
- 训练一个线性回归模型来预测边缘框偏移(bounding box prediction)
- 兴趣区域(Rol)池化层
- 给定一个锚框,均匀分割(如果没法均匀分割,取整)成 n x m 块,输出每块的最大值(max pooling)
- 不管锚框多大,总是输出 nm 个值
- 目的:每个锚框都可以变成想要的形状
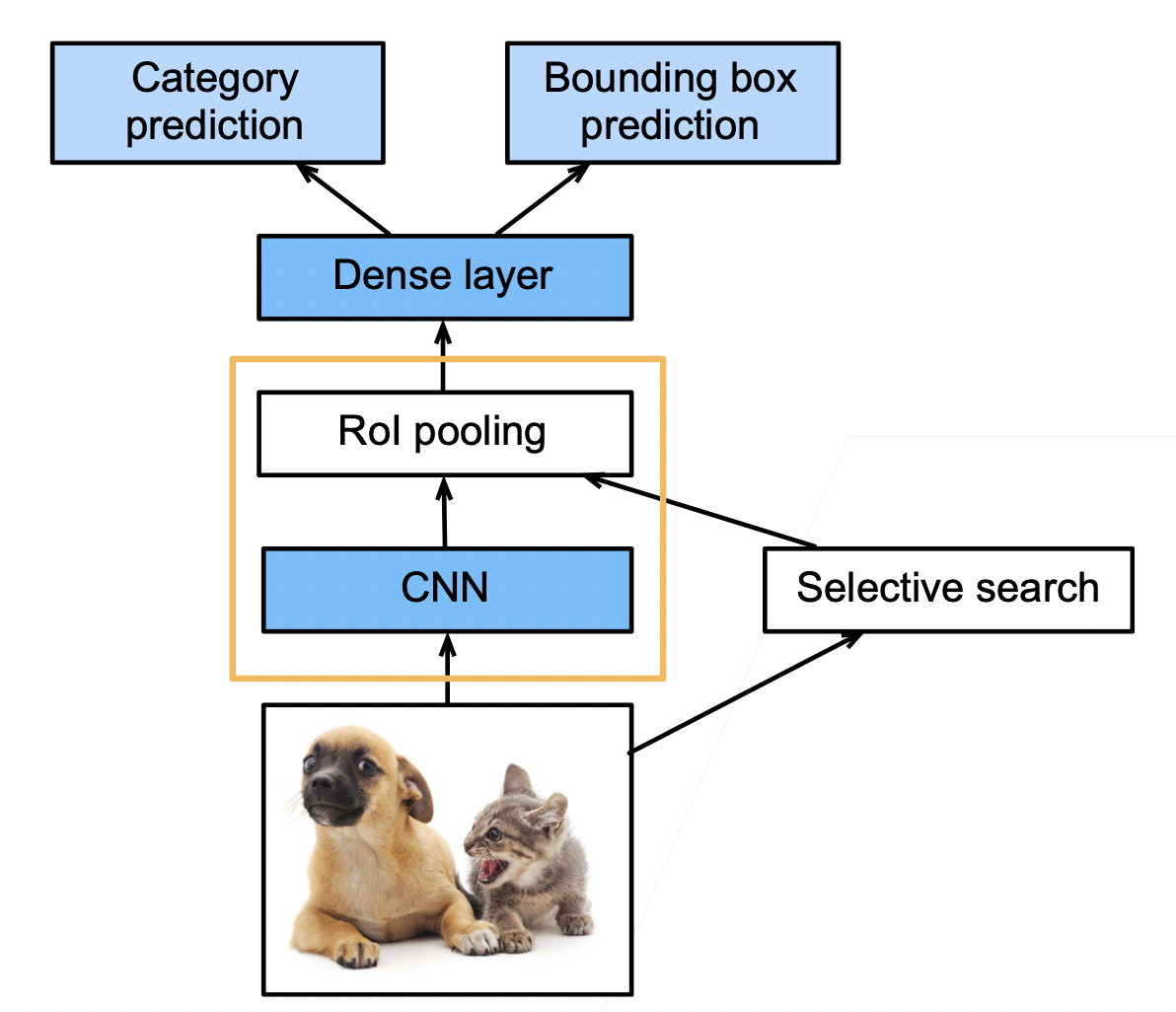
Fast RCNN
- RCNN 需要对每个锚框进行 CNN 运算,这些特征抽取计算有重复,并且锚框数量大,特征抽取的计算量也大。Fast RCNN 改进了这种计算量大的问题
- 使用 CNN 对整张图片抽取特征(快的关键)
- 使用 Rol 池化层对每个锚框(将在原图片中搜索到的锚框,映射到 CNN 得到的结果上),生成固定长度的特征
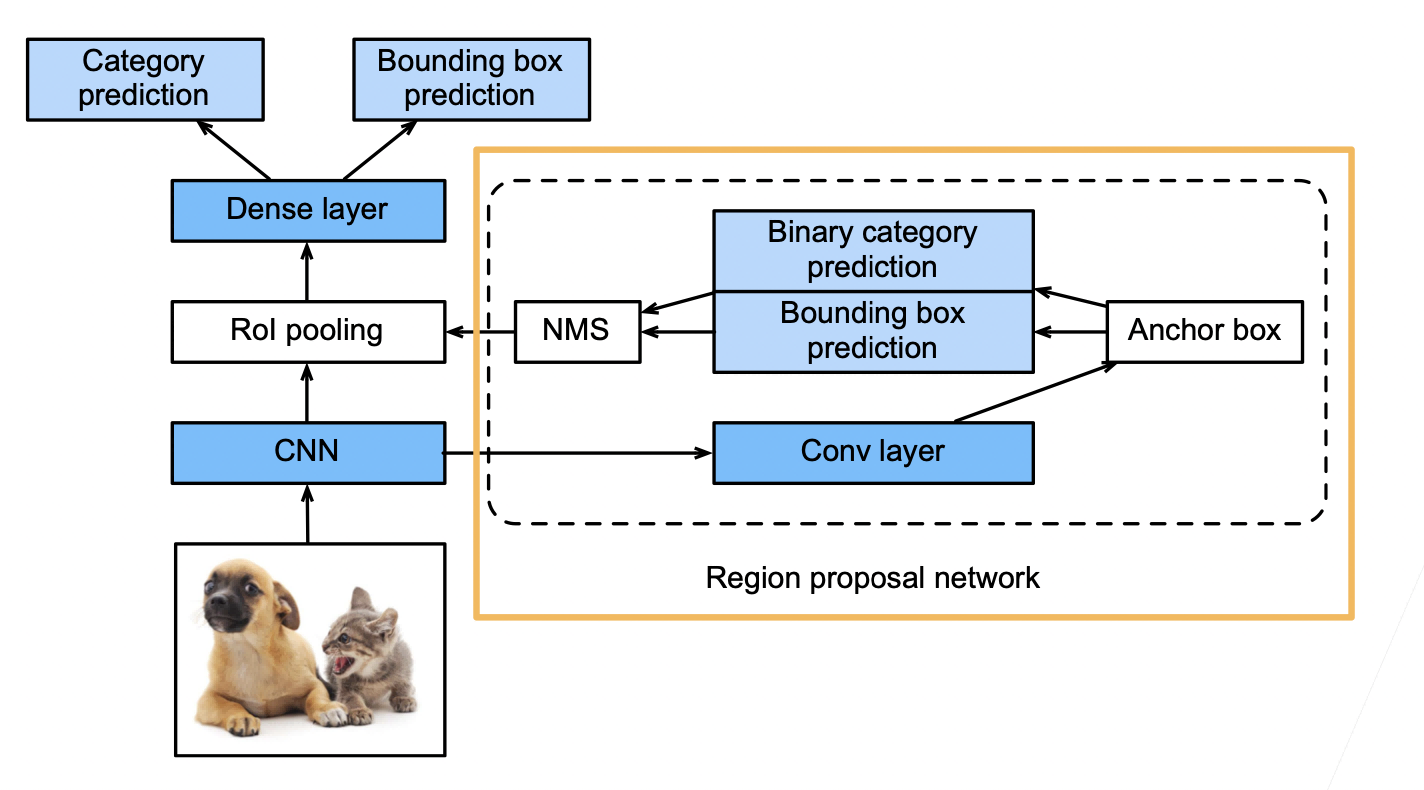
Faster RCNN
- 在 Fast RCNN 基础上变得更快
- 使用一个 区域提议网络来替代启发式搜索获得更好的锚框
- 如下图所示,将 CNN 结果输入到卷积层,然后用锚框去圈区域,这些锚框很多有好有坏,然后进行预测,binary 预测是预测这个锚框的好坏,即有没有有效的圈住物体,bounding box prediction 预测是对锚框进行一些改进,最后用 NMS(非极大值抑制)对锚框进行合并。
- 具体来说,区域提议网络的计算步骤如下:
- 使用填充为 1 的 3×3 的卷积层变换卷积神经网络的输出,并将输出通道数记为 c。这样,卷积神经网络为图像抽取的特征图中的每个单元均得到一个长度为 c 的新特征。
- 以特征图的每个像素为中心,生成多个不同大小和宽高比的锚框并标注它们。
- 使用锚框中心单元长度为 c 的特征,分别预测该锚框的二元类别(含目标还是背景)和边界框。
- 使用非极大值抑制,从预测类别为目标的预测边界框中移除相似的结果。最终输出的预测边界框即是兴趣区域汇聚层所需的提议区域。
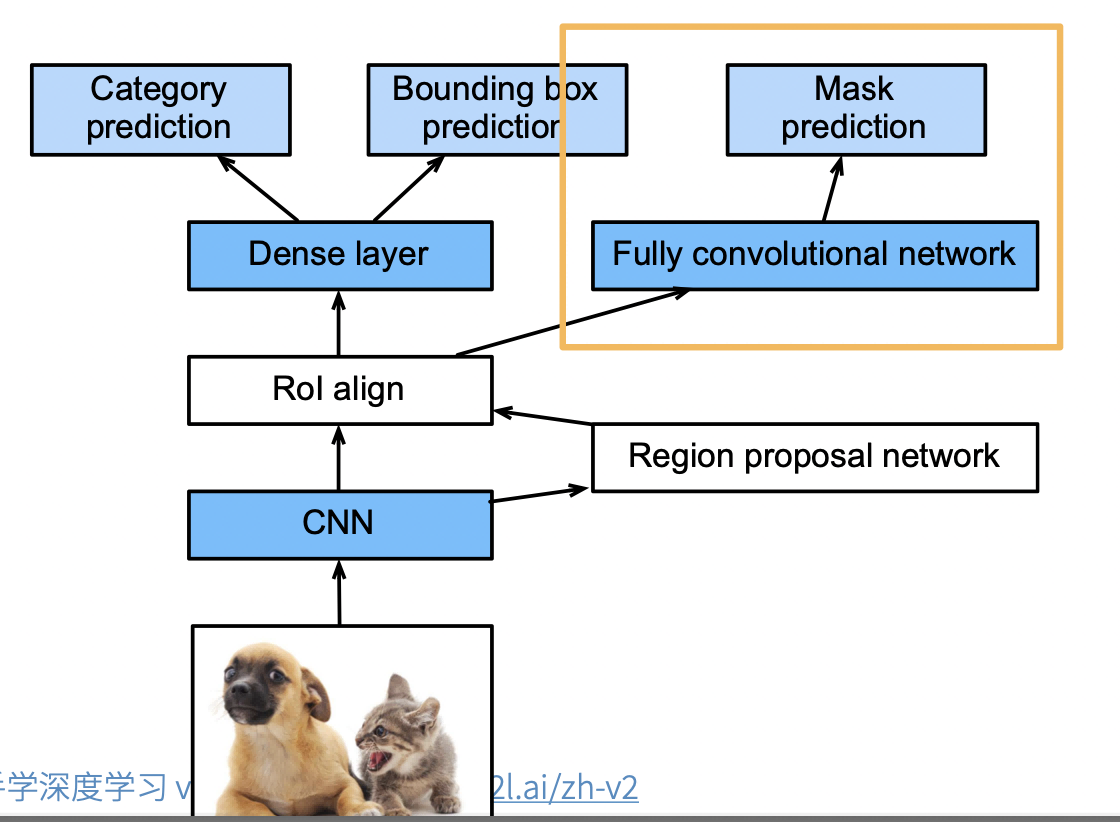
Mask RCNN
- 如果有像素级别的标号,使用 FCN(fully convolutional network)利用这些信息。可以提升 CNN 的性能
- Rol align。之前的 Rol 进行池化的时候,如果没法整除,可以直接取整。但是像素级别的标号预测的时候,会造成偏差的累积,导致边界预测不准确。未来避免这种情况,使用 Rol align,也就是当没法整除,对每个像素值进行按比例分配。
具体来说,Mask R-CNN 将兴趣区域汇聚层替换为了兴趣区域对齐层,使用双线性插值(bilinear interpolation)来保留特征图上的空间信息,从而更适于像素级预测。 兴趣区域对齐层的输出包含了所有与兴趣区域的形状相同的特征图。 它们不仅被用于预测每个兴趣区域的类别和边界框,还通过额外的全卷积网络预测目标的像素级位置。
单发多框检测(SSD single shot detection)
生成锚框
对每个像素,生成多个以它为中心的锚框。给定
SSD 模型
对多个分辨率下的卷积特征,生成锚框并进行预测。具体步骤如下:
- 使用一个基础网络抽取特征,然后用多个卷积层来减半高宽。
- 在每段卷积特征上都生成锚框。
- 底部段适合拟合小物体,顶部段适合拟合大物体。
- 对每个锚框预测类别和边缘框。
YOLO(you only look once)
- SSD 中锚框大量重复,因此浪费了很多计算资源
- YOLO 将图片均分为 S X S 个锚框
- 每个锚框预测 B 个边缘框(防止多个物体出现在一个锚框里面)
- 后续版本 v2 v3 v4 有持续改进
- 非锚框算法