算法优化
K-Means 的优缺点
优点
- 原理简单(靠近中心点),实现容易
- 聚类效果中上(依赖 K 的选择)
- 空间复杂度 o(N),时间复杂度 o(IKN)
缺点
- 对离群点,噪声敏感 (中心点易偏移)
- 很难发现大小差别很大的簇及进行增量计算
- 结果不一定是全局最优,只能保证局部最优(与 K 的个数及初值选取有关)
那么有没有什么办法可以改进 K-means 算法的缺点呢?下面介绍几种优化方法。
Canopy 算法配合初始聚类
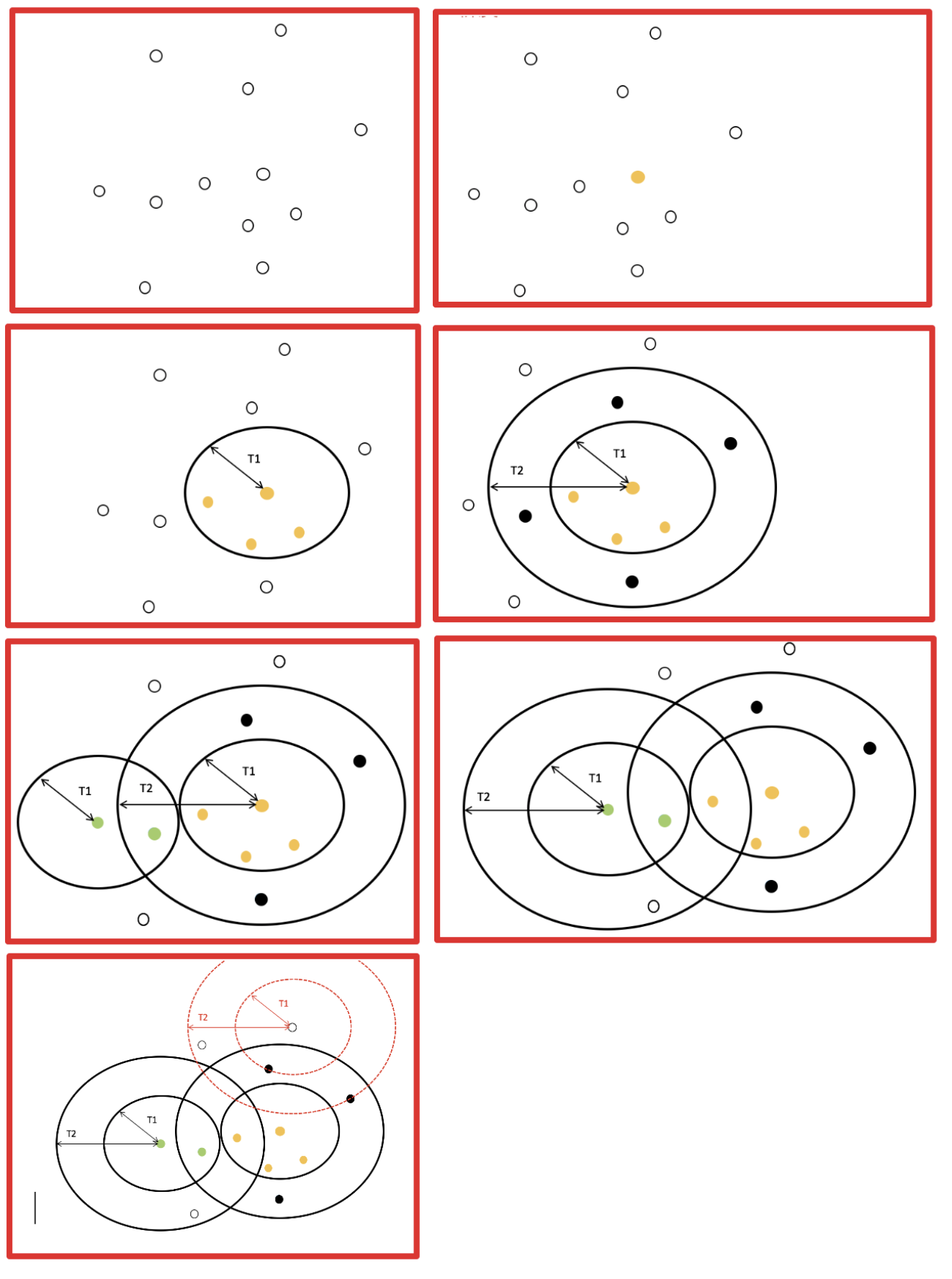
优点:
- Kmeans 对噪声抗干扰较弱,通过 Canopy 对比,将较小的 NumPoint 的 Cluster 直接去掉有利于抗干扰。
- Canopy 选择出来的每个 Canopy 的 centerPoint 作为 K 会更精确。
- 只是针对每个 Canopy 的内做 Kmeans 聚类,减少相似计算的数量。
缺点:
算法中 T1、T2 的确定问题 ,依旧可能落入局部最优解
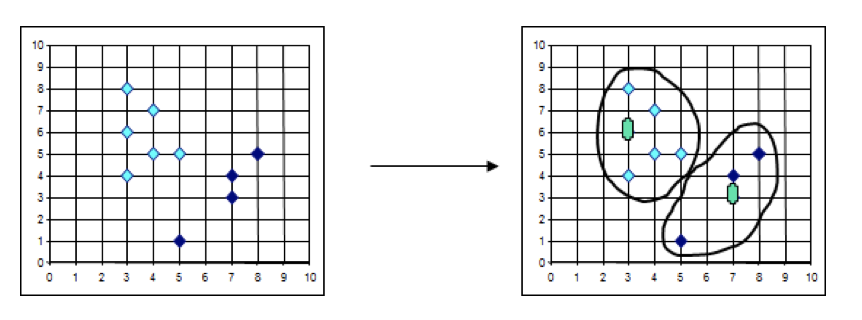
K-means++
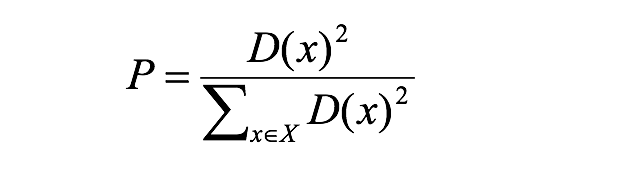
其中:

为方便后面表示,把其记为 A

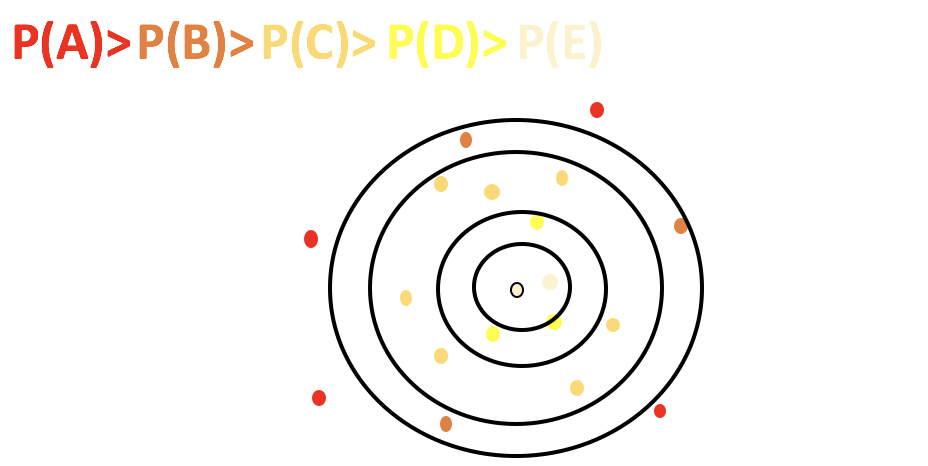
kmeans++目的,让选择的质心尽可能的分散
如下图中,如果第一个质心选择在圆心,那么最优可能选择到的下一个点在 P(A)这个区域(根据颜色进行划分)
二分 k-means
实现流程:
- 所有点作为一个簇
- 将该簇一分为二
- 选择能最大限度降低聚类代价函数(也就是误差平方和)的簇划分为两个簇。
- 以此进行下去,直到簇的数目等于用户给定的数目 k 为止。
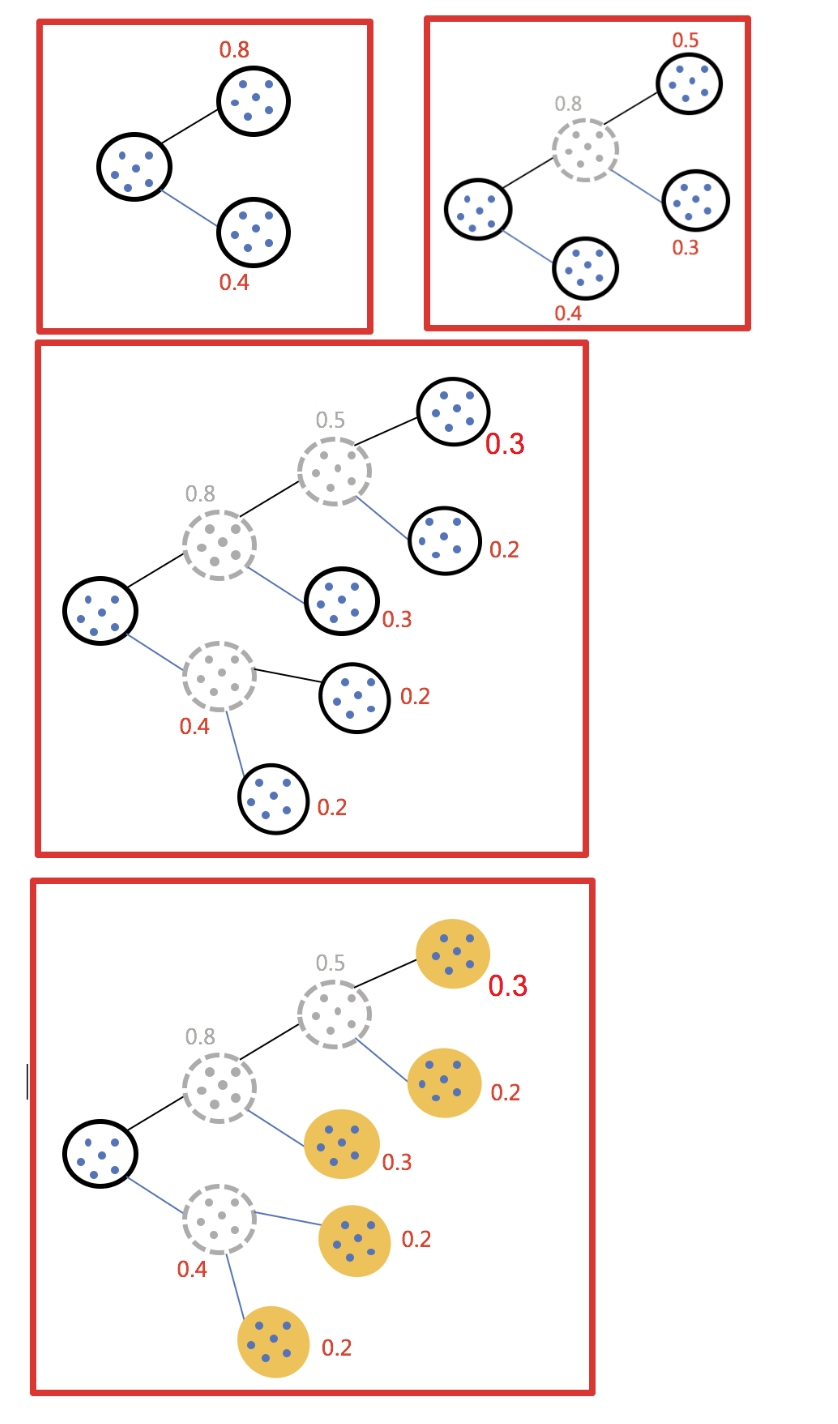
隐含的一个原则:
因为聚类的误差平方和能够衡量聚类性能,该值越小表示数据点越接近于他们的质心,聚类效果就越好。所以需要对误差平方和最大的簇进行再一次划分,因为误差平方和越大,表示该簇聚类效果越不好,越有可能是多个簇被当成了一个簇,所以我们首先需要对这个簇进行划分。
二分 K 均值算法可以加速 K-means 算法的执行速度,因为它的相似度计算少了并且不受初始化问题的影响,因为这里不存在随机点的选取,且每一步都保证了误差最小
k-medoids(k-中心聚类算法)
K-medoids 和 K-means 是有区别的,不一样的地方在于中心点的选取
- K-means 中,将中心点取为当前 cluster 中所有数据点的平均值,对异常点很敏感!
- K-medoids 中,将从当前 cluster 中选取到其他所有(当前 cluster 中的)点的距离之和最小的点作为中心点。
算法流程:
- 总体 n 个样本点中任意选取 k 个点作为 medoids
- 按照与 medoids 最近的原则,将剩余的 n-k 个点分配到当前最佳的 medoids 代表的类中
- 对于第 i 个类中除对应 medoids 点外的所有其他点,按顺序计算当其为新的 medoids 时,代价函数的值,遍历所有可能,选取代价函数最小时对应的点作为新的 medoids
- 重复 2-3 的过程,直到所有的 medoids 点不再发生变化或已达到设定的最大迭代次数
- 产出最终确定的 k 个类
k-medoids 对噪声鲁棒性好。
Kernel k-means
kernel k-means 实际上,就是将每个样本进行一个投射到高维空间的处理,然后再将处理后的数据使用普通的 k-means 算法思想进行聚类。
ISODATA
类别数目随着聚类过程而变化;
对类别数会进行合并,分裂,
“合并”:(当聚类结果某一类中样本数太少,或两个类间的距离太近时)
“分裂”:(当聚类结果中某一类的类内方差太大,将该类进行分裂)
Mini Batch K-Means
适合大数据的聚类算法
大数据量是什么量级?通常当样本量大于 1 万做聚类时,就需要考虑选用 Mini Batch K-Means 算法。
Mini Batch KMeans 使用了 Mini Batch(分批处理)的方法对数据点之间的距离进行计算。
Mini Batch 计算过程中不必使用所有的数据样本,而是从不同类别的样本中抽取一部分样本来代表各自类型进行计算。由于计算样本量少,所以会相应的减少运行时间,但另一方面抽样也必然会带来准确度的下降。
该算法的迭代步骤有两步:
- 从数据集中随机抽取一些数据形成小批量,把他们分配给最近的质心
- 更新质心
与 Kmeans 相比,数据的更新在每一个小的样本集上。对于每一个小批量,通过计算平均值得到更新质心,并把小批量里的数据分配给该质心,随着迭代次数的增加,这些质心的变化是逐渐减小的,直到质心稳定或者达到指定的迭代次数,停止计算。